最新研究发现蜥虎降落以尾助稳 或可用于飞行机
【作者】网站采编
【关键词】
【摘要】中新网北京9月3日电(记者孙子发)施普林格自然开放获取专业学术期刊《新闻-生物学》近日出版一篇动物学研究论文称,在树间滑行的亚洲蝎尾蜥(也称亚洲蝎虎)在着陆时可能会用

中新网北京9月3日电(记者孙子发)施普林格自然开放获取专业学术期刊《新闻-生物学》近日出版一篇动物学研究论文称,在树间滑行的亚洲蝎尾蜥(也称亚洲蝎虎)在着陆时可能会用它的尾巴来稳定。该研究可用于相关机器人的开发,以帮助无人机等飞行机器人在垂直表面着陆时保持稳定。
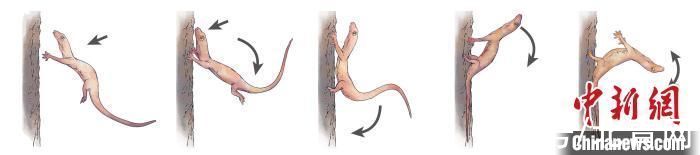
蜥蜴下降停止时的动作序列(图片来自Andre Wee)。照片由 Springer Nature 提供
该论文的通讯作者 Ardian Jusufi 和德国马克斯普朗克智能系统研究所及其同事为了更好地了解蜥蜴和老虎在着陆时的尾巴摆动他们使用了一个高速摄像机拍摄了30只野生蜥蜴从高台跳到附近树上的过程,然后用近距离高速摄像机拍摄了其中16只蜥蜴着陆时的动作。

蜥蜴虎机器人2(图片来自Ardian Jusufi Lab)。照片由 Springer Nature 提供
研究小组观察到,蜥蜴会先用头部撞击树,然后使身体和尾巴向后摆动。在大多数着陆情况下(14 次中的 8 次),蜥蜴的身体和头部会远离躯干摆动,导致它们失去对前脚的控制,但它们会通过将尾巴压在躯干上来防止跌倒。 .其中,5只蜥蜴落地时四只脚都在树干上,另外一只失去控制掉了下来。另外两只蜥蜴在试图着陆后也从树干上掉了下来。
为了进一步研究蜥蜴如何利用尾巴摆动防止坠落,论文作者开发了两个类似蜥蜴的柔性机器人,并用弹射器将它们发射出去,模拟从滑动到滑落的过程。高速着陆。这两个机器人的比例类似于蜥蜴,但一个机器人有一条蜥蜴般的尾巴,另一个没有。

蜥蜴虎机器人1(图片来自Ardian Jusufi Lab)。照片由 Springer Nature 提供
通过测量两个机器人用魔术贴降落在垂直表面时脚部产生的力,研究小组发现无尾机器人在实验中成功着陆的概率为垂直面只有 15%,而有尾机器人的成功概率为 55%。如果尾巴长度缩短到原来长度的25%,机器人成功着陆所需的脚力需要增加一倍以上。现场观察结果、机器人和分析模型表明,尾部可以通过减少机器人粘在垂直表面所需的力来提高着陆的稳定性和成功率。

一只蜥蜴在树干上休息(图片来自 Ardian Jusufi 实验室)。照片由 Springer Nature 提供
这项研究的结果表明,蜥蜴的尾巴在树间滑动时也可能具有类似的稳定作用。该论文的作者认为,类似于蜥蜴尾巴的结构可能有助于无人机等飞行机器人在垂直表面着陆时保持稳定。 (完)
[编辑:李玉素]
文章来源:《动物学研究》 网址: http://www.dwxyjzz.cn/zonghexinwen/2021/0904/690.html